Animation of the autonomous chemical detector RoboChart model
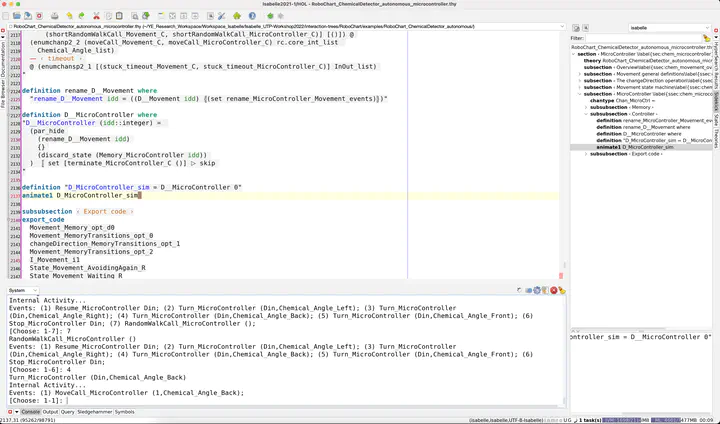
Here we demonstrate the animation of an autonomous chemical detector using Interaction Trees in Isabelle/HOL.
The theoretical semantics is well-documented in this ICFEM2022 paper: “Formally Verified Animation for RoboChart Using Interaction Trees”.
The Isabelle/HOL theories for the animation can be found here.
This work is also presented at ICFEM2022 and the presentation can be found here.
Kangfeng (Randall) Ye
Research Associate (Computer Science)
My research interests include probabilistic modelling and verification using formal specification and verification (both model checking and theorem proving) and model-based engineering.