Animation of a patrol robot model
Based on operational semantics of RoboChart using Interaction Trees

Here we demonstrate the animation of a patrol robot model below using Interaction Trees in Isabelle/HOL.
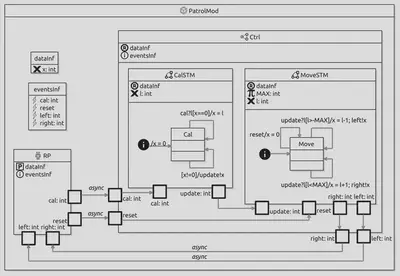
The corridor for the robot to patrol has three sections, shown below.

The Isabelle/HOL theories for the animation can be found here.
Kangfeng (Randall) Ye
Research Associate (Computer Science)
My research interests include probabilistic modelling and verification using formal specification and verification (both model checking and theorem proving) and model-based engineering.